
Research seminatural simulator for piloting tasks and flight data processing analysis
Просмотров: 2505
Август 2012 года
Korsun O.N., Burlak E.A., Nabatchikov A.M. Research seminatural simulator for piloting tasks and flight data processing analysis // Седьмой международный аэрокосмический конгресс IAC’2012. Сб. научн. тр. М.: 2013. 1 электрон. опт. диск (CD-ROM) рег. № 0321303652/03.06.2013
Мероприятие: Седьмой Международный Аэрокосмический Конгресс IAC'12
Гос. Рег. №: 0321303652
страница конференции
Гос. Рег. №: 0321303652
страница конференции
Introduction
This article presents the structure, composition and algorithmic support of hardware and software for modeling the spatial movement of the aircraft. The proposed stand is conceptually different from the spread in flight simulators currently stands, which are usually intended for testing of aircraft equipment or for training flight crews. The complex designed for the analysis of flight tasks and flight data processing algorithms. The main feature of the stand is the relative simplicity of the interface in conjunction with the full simulation of the dynamics of the aircraft.
The description of the stand
The stand is a program for Microsoft Windows operating systems, which uses to interact with the user by function library Xors3d Engine (based on GAPI DirectX9). By interaction is meant a input devices polling (which include aircraft control stick and the handle engine management) and output of graphic images on the screen. Central to the implementation of the modeling of the dynamics of aircraft is based upon working together support libraries (separate modeling of the aircraft flight conditions or external) and the aircraft dynamic library. Thanks to the modularity and the appropriate approach when writing source code implementation of the aircraft dynamic library (with the appropriate interface to the task) has been used successfully in a number of other applications. For example, to simulate different flight modes used for expanding software package MATLAB (MEX-function), the same library is used to research the characteristics of the human operator in the control and guidance of aircraft.
Visualization of the state of aircraft is implemented through a simplified graphical interface that displays the main elements of the information field of the cabin (Fig. 1).
The program allows you to simulate interactive input mode of control signals from operator. These parameters are recorded on the scale required in memory at a given frequency in a given volume. After completion of the program, the data is stored in the required format to the file.
The hardware of the stand
The hardware consists of a PC connected to it with a monitor for displaying information to the operator and aircraft control stick and handle engine management for operator input control signals. As the governing body discussed a variety of devices (remote control with an external ADC aircraft control stick Thrustmaster Top Gun AfterBurner II, Thrustmaster Hotas Warthog, QuickShot QS-123 Warrior 5). To determine the most suitable manipulator, a series of similar experiments was taken, which revealed features of the devices in different modes (stationary state, the smooth deviation), based on recorded data. Analysis of the performance (delay, resolution, fluctuations in the absence of exposure, the noise signal devices), obtained from the measured data during the experiment, revealed a device meeting the requirements and imposed by the specifics of operation and ergonomics - the aircraft control stick and the handle engine management Thrustmaster Hotas Warthog, which is replica of the attack aircraft A-10C.

Figure 1. General view of the dashboard stand
Mathematical model
To reduce errors caused by simplification of the equations of motion, it is recommended to choose the model of the spatial motion of the aircraft, for example, presented in [1]. This provides the relative simplicity of the equations and at the same time a very full account of the flight dynamics of known relationships between the parameters of the movement. The aerodynamic coefficients are described by conventional linear models, and if necessary, taking into account non-linearities - polynomials or splines 1 or 3 orders of magnitude.
Currently, there are many different models of planes with different degrees of complexity and the assumptions made [1]. Rather complete nonlinear model of the spatial movement of the aircraft under the assumption that the axes of the coordinate system related to coincide with the principal axes of inertia, is given by [1]:
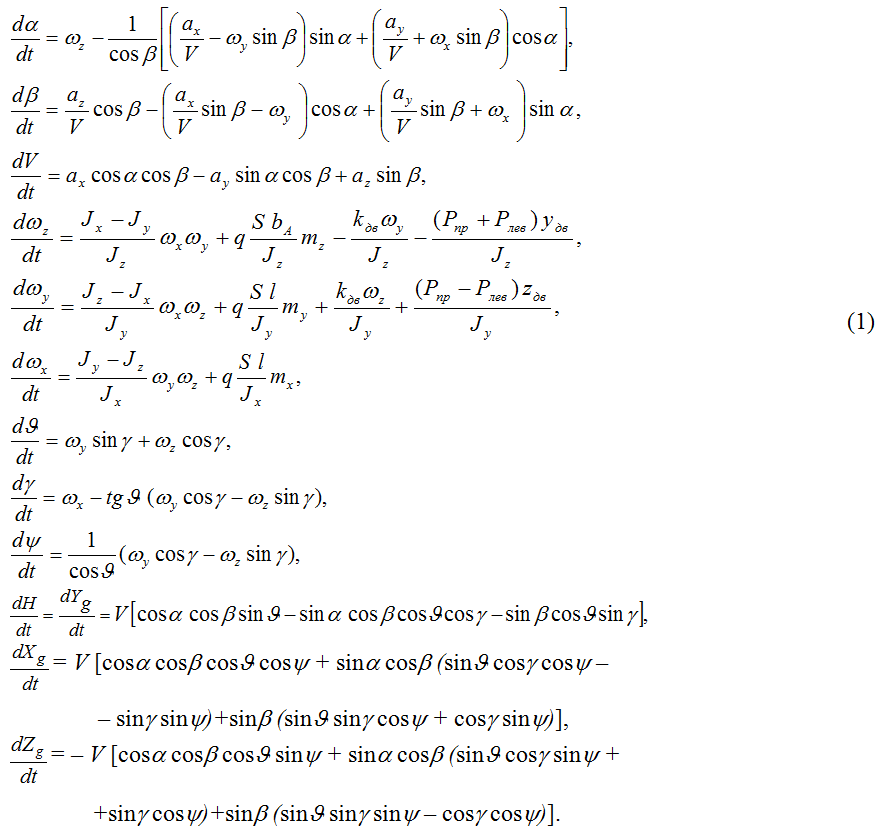
Acceleration along the related axes:

Overload along the related axes:

In the systems of equations (1) - (3) use the following notation:
α, β – angles of attack and sideslip, rad.; ωx, ωy, ωz – angular velocity relative to the associated axis, rad./sec; θ, γ, ψ – the angles of pitch, roll, yaw, rad.; V – airspeed, m/s; H=Yg – altitude, m; Xg, Yg, Zg - the coordinates of the flight in the Earth's normal system of coordinates; mx, my, mz – the coefficients of aerodynamic moments; cx, cy, cz – coefficients of aerodynamic forces in the coupled system of coordinates; Jx, Jy, Jz , Jxy – moments of inertia about the axes associated, kg×m2; m – – mass of the aircraft, kg; l, bA – the wingspan and the length of the average aerodynamic chord, m; S – equivalent to the wing area, m2; q=ρHV2/2 – the dynamic pressure, Pa; ρH – air density at flight altitude, kg/m3; cp=P/qS – the coefficient of thrust; Рпр, Рлeв – thrust right and left motors, H; kдв – angular momentum of the rotors of engines, kg×m2; удв, zдв – coordinates relative to the engine-related axes, m; φдв – the angle of the engine, rad.
The values of the coefficients of lift and drag determined from the results of aerodynamic purging, usually given in a coordinate system OXeYeZe. To translate these coefficients from one system to another using the relation:

where cxe, cye – components of the aerodynamic coefficients of force in the coordinate system OXeYeZe; cx, cy – components of the aerodynamic coefficients of force-related coordinate system.
The linear model of the aerodynamic coefficients of longitudinal and lateral motion is
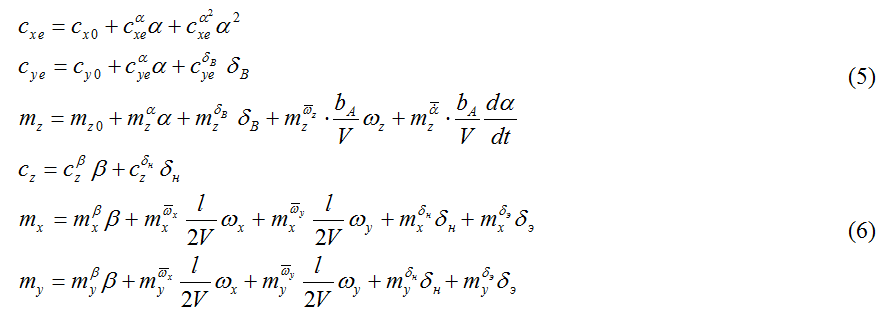
where the parameters are the derivatives of the coefficients of aerodynamic forces and moments on the angle of attack α, the deviation stabilizer δВ, sideslip angle β, the deviations rudder δн and ailerons δэ, angular velocity ωx, ωy, ωz.
In order to assess compliance with the characteristics of the aircraft performed a standard control modes to determine the stability and control characteristics: pulses, stepped villas, relocation of controls, etc. In conjunction with these multi-mode test modes performed to clarify the parameters of the mathematical model, methods of identification. Next, we used the [2], using the relation between the parameters given by equations of motion of the aircraft and is designed to validate the measurement and recording flight data: angles of attack, sideslip, roll, pitch, true airspeed, and angular velocities and accelerations measured in the associated coordinate system.
To simulate conditions close to real operating conditions in the stand is implemented:
- the standard model of atmospheric [3], in which the calculated values of the density of air and static pressure at the flight altitude, flight number M;
- wind model, in which the wind speed is given by three projections on the axis of the earth's normal system of coordinates, which are known functions of time Vxg_W, Vyg_W, Vzg_W.
Tasks
With the help of the developed tools solve a number of important objectives:
- Research the characteristics of the human operator in the control and guidance of aircraft (using the model of the dynamics).
- Testing of algorithms for integrated flight system at various flight conditions.
- Testing of algorithms for estimating the errors on-board measurements of air speed, angle of attack and sideslip on measurements of the satellite navigation system for the identification of the wind.
- Testing of complex algorithms, validation and registration of on-board measurements of key parameters of the aircraft.
The work is supported by the Russian Foundation for Basic Research (RFBR), project 12-08-00682.
References
- Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов. /Под редакцией Г.С. Бюшгенса. М.: Наука, 1998, – 811 с.
- Корсун О.Н., Лысюк О.П. Комплексная оценка погрешностей бортовых измерений и регистрации в целях обеспечения задач безопасности полетов // Проблемы безопасности полетов. – М.:ВИНИТИ, 2007. – № 2.
- ГОСТ 4401-81. Атмосфера стандартная. Параметры. М. 1982 – 181 с.
Комментарии