Исследовательский полунатурный стенд для анализа задач пилотирования и алгоритмов обработки полетных данных
Просмотров: 2139
Август 2012 года
Корсун О.Н., Бурлак Е.А., Набатчиков А.М. Исследовательский полунатурный стенд для анализа задач пилотирования и алгоритмов обработки полетных данных // Седьмой международный аэрокосмический конгресс IAC’2012. Сб. научн. тр. М.: 2013. 1 электрон. опт. диск (CD-ROM) рег. № 0321303652/03.06.2013.
Мероприятие: Седьмой Международный Аэрокосмический Конгресс IAC'12
Гос. Рег. №: 0321303652
страница конференции
Гос. Рег. №: 0321303652
страница конференции
Введение
В настоящей статье представлена структура, состав и алгоритмическое обеспечение программно-аппаратного комплекса для моделирования пространственного движения летательного аппарата. Предлагаемый стенд концептуально отличается от распространенных в настоящее время пилотажных моделирующих стендов, которые, как правило, предназначены для отработки авиационного оборудования или для обучения летного состава (тренажеры). Рассматриваемый исследовательский комплекс предназначен для анализа задач пилотирования и алгоритмов обработки полетных данных. Главная особенность стенда заключается в относительной простоте интерфейса в сочетании с полнотой моделирования динамики ЛА.
Общее описание стенда
Стенд представляет собой программу для операционных систем Microsoft Windows, использующую для взаимодействия с пользователем функции библиотеки Xors3d Engine (базирующиеся на GAPI DirectX9). Под взаимодействием здесь подразумевается как опрос устройств ввода (к которым относятся ручка управления самолётом (РУС) и ручка управления двигателем (РУД)), так и вывод графических образов на экран. Центральное место в реализации занимает моделирование динамики ЛА, основанное на работе совокупности библиотек поддержки (моделирующих обособленные части ЛА или внешние условия полёта) и библиотеке динамики. Благодаря модульности и соответствующему подходу при написании исходного кода, реализация динамики (с соответствующим решаемой задаче интерфейсом) успешно используется в ряде других приложений. Например, для моделирования различных режимов полёта используется расширение для пакета прикладных программ MATLAB (MEX-функция), эта же библиотека используется для исследований характеристик деятельности человека-оператора при управлении и наведении ЛА.
Визуализация состояния ЛА реализуется посредством упрощённого графического интерфейса, отображающего основные элементы информационного поля кабины (рис.1).
Программа позволяет провести моделирование в режиме интерактивного ввода управляющих сигналов оператором. Указанные параметры в необходимом масштабе фиксируются в оперативной памяти с заданной частотой и в заданном объёме. После завершения работы программы, данные сохраняются в требуемом формате в файл.
Аппаратная часть
Аппаратная часть состоит из ПЭВМ с подключенными к ней монитором для отображения информации оператору и имитаторов РУС и РУД, для ввода оператором управляющих сигналов. В качестве органа управления рассматривались различные устройства (пульт с внешним АЦП, имитатор РУС Thrustmaster Top Gun AfterBurner II, Thrustmaster Hotas Warthog, QuickShot QS-123 Warrior 5). Для определения наиболее подходящего манипулятора, была проведена серия однотипных экспериментов, выявляющих особенности работы устройств в разных режимах (неподвижное состояние, плавное отклонение), на основе регистрируемых данных. Анализ характеристик (задержки, разрешающая способность, флуктуация при отсутствии воздействия, шум сигнала устройства), полученных из снятых в ходе эксперимента данных, позволил выявить устройство, отвечающее и требованиям, накладываемым спецификой эксплуатации, и эргономике – имитатор РУС и РУД Thrustmaster Hotas Warthog, являющийся репликой соответствующих органов управления штурмовика A-10C (ВВС США).

Рис.1. Общий вид приборной панели стенда
Математическая модель
Для уменьшения погрешностей, вызванных упрощением уравнений движения, рекомендуется выбирать модель пространственного движения самолета, например, представленную в [1]. При этом обеспечивается относительная простота уравнений и одновременно весьма полный учет известных из динамики полета связей между параметрами движения. Аэродинамические коэффициенты описываются общепринятыми линейными моделями, а при необходимости учета нелинейностей – полиномами или сплайнами 1 или 3 порядков.
В настоящее время известно много различных моделей движения самолетов, отличающихся степенью сложности и принятыми допущениями [1]. Достаточно полная нелинейная модель пространственного движения самолета при допущении, что оси связанной системы координат совпадают с главными осями инерции, имеет вид [1]:
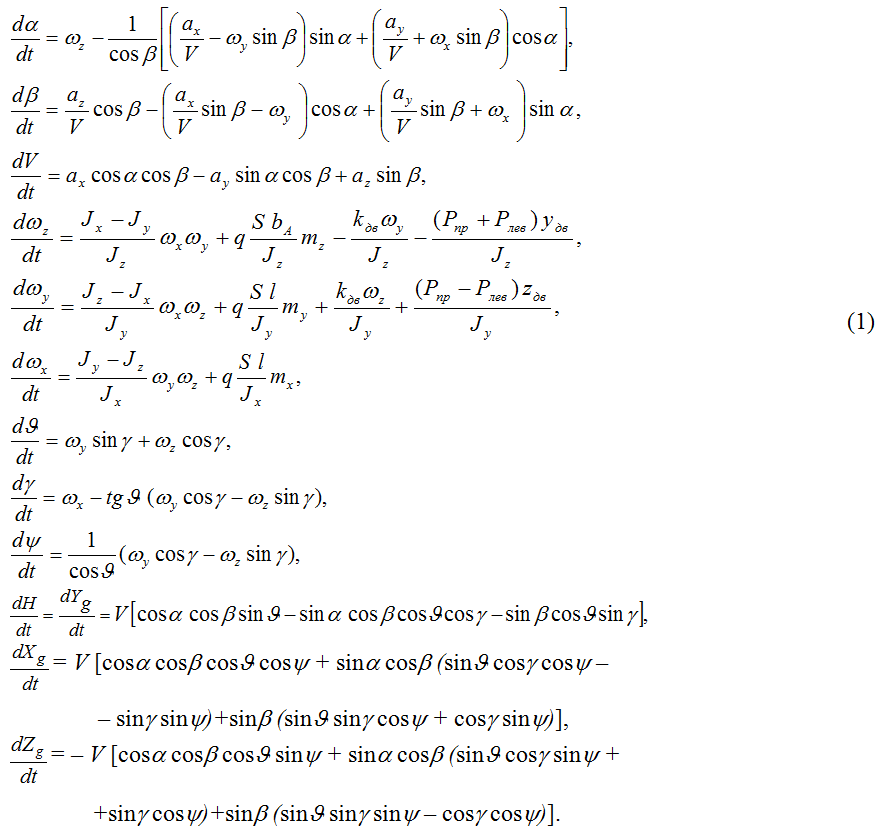
Ускорения вдоль связанных осей:

Перегрузки вдоль связанных осей:

В системах уравнений (1)-(3) используются следующие обозначения:
α, β – углы атаки и скольжения, рад; ωx, ωy, ωz – угловые скорости относительно связанных осей, рад./с; θ, γ, ψ – углы тангажа, крена, рыскания, рад.; V – истинная воздушная скорость, м/с; H=Yg – высота полета, м; Xg, Yg, Zg - координаты полета в земной нормальной системе координат; mx, my, mz – коэффициенты аэродинамических моментов; cx, cy, cz – коэффициенты аэродинамических сил в связанной системе координат; Jx, Jy, Jz , Jxy – моменты инерции относительно связанных осей, кг×м2; m – масса самолета, кг; l, bA – размах крыла и длина средней аэродинамической хорды, м; S – эквивалентная площадь крыла, м2; q=ρHV2/2 – скоростной напор, Па; ρH – плотность воздуха на высоте полета, кг/м3; cp=P/qS – коэффициент тяги двигателей; Рпр, Рлeв – сила тяги правого и левого двигателей, Н; kдв – кинетический момент роторов двигателей, кг×м2; удв, zдв – координаты двигателя относительно связанных осей, м; φдв – угол установки двигателей, рад.
Значения коэффициентов подъемной силы и сопротивления, определенные по результатам аэродинамических продувок, обычно задаются в полусвязанной системе координат OXeYeZe. Для перевода данных коэффициентов из одной системы в другую используются соотношения:

где cxe, cye – коэффициенты составляющих аэродинамической силы в полусвязанной системе координат; cx, cy – коэффициенты составляющих аэродинамической силы в связанной системе координат.
Линейная модель аэродинамических коэффициентов продольного и бокового движения имеет вид
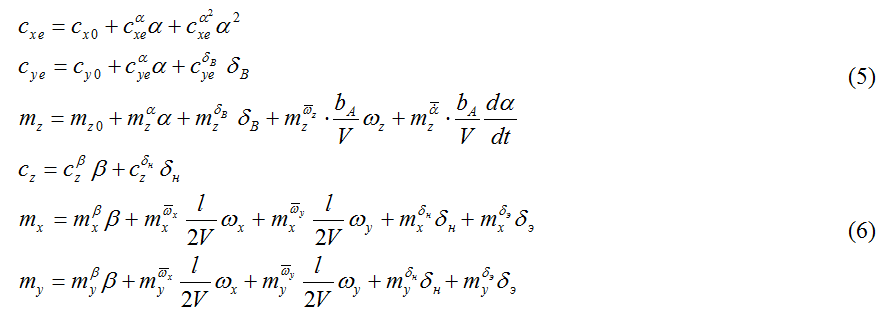
где параметрами являются производные коэффициентов аэродинамических сил и моментов по углу атаки α, отклонению стабилизатора δВ, углу скольжения β, отклонениям руля направления δн и элеронов δэ, угловым скоростям ωx, ωy, ωz.
С целью оценки соответствия характеристик модели реальному ЛА выполнялись стандартные контрольные режимы для определения характеристик устойчивости и управляемости: импульсы, ступенчатые дачи, перекладки органами управления и т.п. В комплексе с данными режимами выполнялись многоступенчатые тестовые режимы для уточнения параметров математической модели методами идентификации. Далее использовалась программа[2], использующая соотношения между параметрами, задаваемые уравнениями движения ЛА, и предназначенная для проверки правильности измерений и регистрации полетных данных: углов атаки, скольжения, крена, тангажа, истинной воздушной скорости, а также угловых скоростей ωx, ωy, ωz и перегрузок nx, ny, nz, измеренных в связанной системе координат.
Для моделирования условий, приближенных к реальным условиям эксплуатации в стенде реализуется:
- модель стандартной атмосферы по [3], по которой рассчитываются значения плотности воздуха и статического давления на высоте полета, число M полета;
- модель ветра, в которой скорость ветра задается тремя проекциями на оси земной нормальной системы координат Vxg_W, Vyg_W, Vzg_W, являющимися известными функциями времени.
Решаемые задачи
При помощи разработанного инструментария решается ряд важных задач:
- Исследование характеристик деятельности человека-оператора при управлении и наведении ЛА (используется модель динамики).
- Отработка алгоритмов КСУ на различных режимах полёта.
- Отработка алгоритмов оценивания погрешностей бортовых измерений воздушной скорости, углов атаки и скольжения по измерениям спутниковой навигационной системы при одновременной идентификации ветра.
- Отработка алгоритмов комплексной проверки правильности бортовых измерений и регистрации основных параметров движения самолёта.
Работа выполнена при поддержке РФФИ, проект 12-08-00682.
Литература
- Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов. /Под редакцией Г.С. Бюшгенса. М.: Наука, 1998, – 811 с.
- Корсун О.Н., Лысюк О.П. Комплексная оценка погрешностей бортовых измерений и регистрации в целях обеспечения задач безопасности полетов // Проблемы безопасности полетов. – М.:ВИНИТИ, 2007. – № 2.
- ГОСТ 4401-81. Атмосфера стандартная. Параметры. М. 1982 – 181 с.
Комментарии