Полунатурный исследовательский стенд для оценивания характеристик деятельности человека-оператора при управлении дистанционно-пилотируемым летательным аппаратом
Просмотров: 2813
03 сентября 2013 года
Бурлак Е. А., Набатчиков А. М. Полунатурный исследовательский стенд для оценивания характеристик деятельности человека-оператора при управлении дистанционно-пилотируемым летательным аппаратом // Электронный журнал «Труды МАИ», ISSN: 1727-6942. Выпуск № 68 от 03 сентября 2013. Режим доступа: http://mai.ru/science/trudy/published.php?ID=41725 (дата обращения 24.03.2015)
ВАК
УДК: 629.7:004:331.101.1
Ключевые слова: полунатурное моделирование, исследовательский стенд, человек-оператор, характеристики деятельности, дистанционно-пилотируемый летательный аппарат
Статья на сайте электронного журнала «Труды МАИ»
Ключевые слова: полунатурное моделирование, исследовательский стенд, человек-оператор, характеристики деятельности, дистанционно-пилотируемый летательный аппарат
Статья на сайте электронного журнала «Труды МАИ»
В работе представлена разработка и тестирование моделирующего комплекса, позволяющего исследовать характеристики деятельности человека-оператора в режиме ручного управления ДПЛА, разработаны средства отображения информации, программно реализована математическая модель динамики ДПЛА, проведены экспериментальные исследования деятельности человека-оператора при управлении динамическими системами в виде типовых звеньев.
В последние годы проявляется возрастающий интерес к созданию беспилотных авиационных систем на основе беспилотных летательных аппаратов (БЛА) и в том числе дистанционно-пилотируемых летательных аппаратов (ДПЛА), в управлении которыми весьма существенная роль отводится человеку-оператору (ЧО). По областям применения ДПЛА делятся на три основные группы: гражданского, военного и антитеррористического назначения.
Круг задач, решаемых ДПЛА, непрерывно расширяется. Если поначалу применение ДПЛА военного назначения ограничивалось решением задач разведки и радиопротиводействия, то в настоящее время разрабатываются ДПЛА-истребители, предназначенные для ведения воздушного боя, а также ударные ДПЛА, основной боевой задачей которых является уничтожение наземных средств ПВО противника и других военных объектов [1].
По мере расширения круга задач, решаемых ДПЛА, роль ЧО, его ответственность за эффективность и безопасность работы системы непрерывно возрастет. Все чаще приходится сталкиваться с ситуацией, когда от человека для поддержания нормального процесса функционирования беспилотных авиационных систем требуется, чуть ли не предельная мобилизация всех его возможностей, когда малейшее изменение в сторону усложнения деятельности или возникновение нештатной ситуации может привести к срыву. По статистике около 70% потерь ДПЛА происходит из-за ошибок ЧО [2, 3]. Из них более половины – результат завышения требований к человеку. Как показывает анализ состояния и тенденций развития систем управления и наведения ДПЛА, в предстоящие годы проблемы их проектирования во многом будут обусловлены необходимостью обеспечения оптимального взаимодействия человека с машиной частью системы. Указанные обстоятельства объясняют потребность в эффективных методах проектирования, обеспечивающих возможность учета свойств ЧО и согласования с ними машинной части системы.
Так как подготовка квалифицированных операторов по управлению ДПЛА является ресурсоемкой задачей, представляется актуальным рассмотреть вопрос оптимального согласования возможностей человека-оператора с машинной частью ДПЛА.
Целью данной работы является создание полунатурного исследовательского стенда для оценивания характеристик деятельности человека-оператора при управлении ДПЛА. На данном комплексе предполагается проведение экспериментов с большой вариативностью в задающих воздействиях, динамических структурах машинной части и др., что позволит глубже изучить возможности человека-оператора, а впоследствии эффективнее решать задачи проектирования человеко-машинных систем слежения.
На данном этапе исследований стоит задача разработки и апробирования полунатурного исследовательского стенда для оценивания характеристик деятельности человека-оператора при управлении ДПЛА. Исходя из рассмотренного выше, представляется целесообразным предъявить следующие требования к облику стенда. Необходимо реализовать инструментарий, позволяющий:
В соответствии с вышеописанным, стенд организован таким образом, что позволяет свободно комбинировать модели динамики различных ЛА и различные методы визуализации: модель динамики реализуется при помощи динамически загружаемой библиотеки динамической компоновки, с интерфейсом, представляющим оговорённый список экспортируемых функций. Динамика моделируется при помощи специального ПО – Диспетчера (в разработке которого принимали участие авторы), выгружающего динамические характеристики в разделяемую память, откуда они считываются необходимыми программными модулями, в том числе, программой визуализации.
Для уменьшения погрешностей, вызванных упрощением уравнений движения, рекомендуется выбирать модель пространственного движения самолета, например, представленную в [4, 5]. При этом обеспечивается относительная простота уравнений и одновременно весьма полный учет известных из динамики полета связей между параметрами движения. Аэродинамические коэффициенты описываются общепринятыми линейными моделями, а при необходимости учета нелинейностей – полиномами или сплайнами 1 или 3 порядков.
В настоящее время известно много различных моделей движения самолетов, отличающихся степенью сложности и принятыми допущениями [4]. Достаточно полная нелинейная модель пространственного движения самолета при допущении, что оси связанной системы координат совпадают с главными осями инерции, имеет вид [4]:
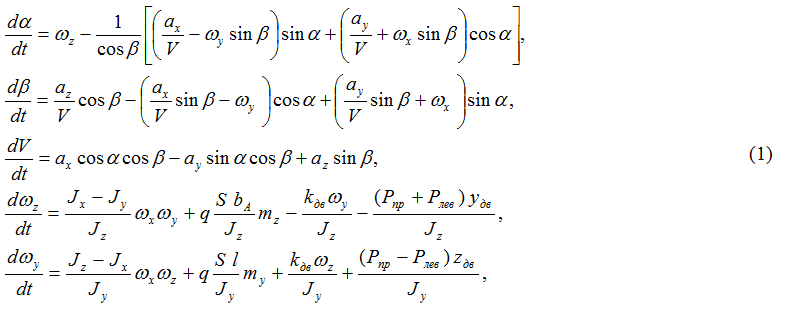
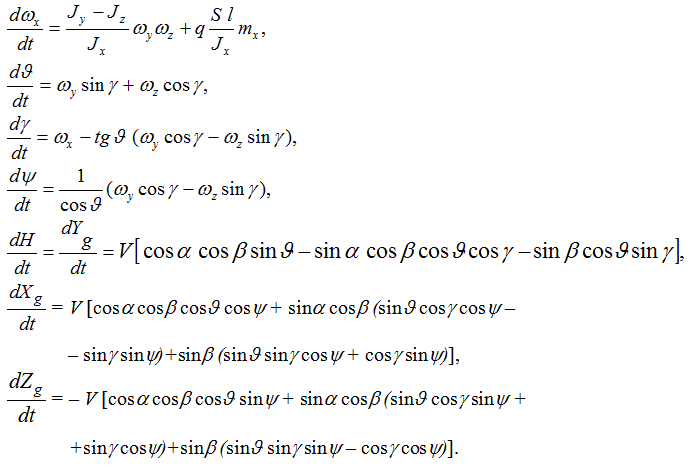
Ускорения вдоль связанных осей:

Перегрузки вдоль связанных осей:

В системах уравнений (1)-(3) используются следующие обозначения:
α, β – углы атаки и скольжения, рад;
ωx, ωy, ωz – угловые скорости относительно связанных осей, рад./с;
θ, γ, ψ – углы тангажа, крена, рыскания, рад.;
V – истинная воздушная скорость, м/с;
H=Yg – высота полета, м;
Xg, Yg, Zg - координаты полета в земной нормальной системе координат;
mx, my, mz – коэффициенты аэродинамических моментов;
cx, cy, cz – коэффициенты аэродинамических сил в связанной системе координат;
Jx, Jy, Jz , Jxy – моменты инерции относительно связанных осей, кг×м2;
m – масса самолета, кг;
l, bA – размах крыла и длина средней аэродинамической хорды, м;
S – эквивалентная площадь крыла, м2;
q=ρHV2/2 – скоростной напор, Па;
ρH – плотность воздуха на высоте полета, кг/м3;
cp=P/qS – коэффициент тяги двигателей;
Рпр, Рлeв – сила тяги правого и левого двигателей, Н;
kдв – кинетический момент роторов двигателей, кг×м2;
удв, zдв – координаты двигателя относительно связанных осей, м;
φдв – угол установки двигателей, рад.
Значения коэффициентов подъемной силы и сопротивления, определенные по результатам аэродинамических продувок, обычно задаются в полусвязанной системе координат OXeYeZe. Для перевода данных коэффициентов из одной системы в другую используются соотношения:

где cxe, cye – коэффициенты составляющих аэродинамической силы в полусвязанной системе координат;
cx, cy – коэффициенты составляющих аэродинамической силы в связанной системе координат.
Линейная модель аэродинамических коэффициентов продольного и бокового движения имеет вид
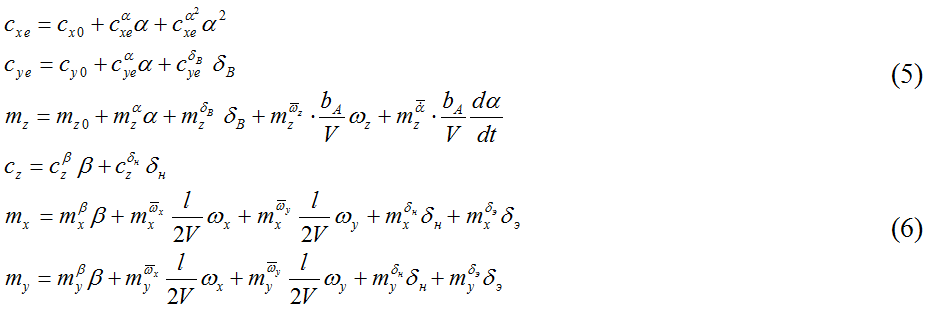
где параметрами являются производные коэффициентов аэродинамических сил и моментов по углу атаки α, отклонению стабилизатора δВ, углу скольжения β, отклонениям руля направления δн и элеронов δэ, угловым скоростям ωx, ωy, ωz.
С целью оценки соответствия характеристик ЛА выполнялись стандартные контрольные режимы для определения характеристик устойчивости и управляемости: импульсы, ступенчатые дачи, перекладки органами управления и т.п. В комплексе с данными режимами выполнялись многоступенчатые тестовые режимы для уточнения параметров математической модели методами идентификации. Далее использовалась программа DatCheck [6], предназначенная для проверки правильности измерений и регистрации полетных данных, характеризующих движение самолета: углов атаки, скольжения, крена, тангажа, истинной воздушной скорости, а также угловых скоростей ωx, ωy, ωz и перегрузок nx, ny, nz, измеренных в связанной системе координат.
Для моделирования условий, приближенных к реальным условиям эксплуатации в стенде реализуется:
Пусть скорость ветра задается тремя проекциями на оси земной нормальной системы координат Vxg_W, Vyg_W, Vzg_W.
Тогда проекции воздушной скорости самолета в земной нормальной системе координат имеют вид:

где Vxg, Vyg, Vzg – значения проекций скорости ЛА в спокойной атмосфере на оси нормальной земной системы. Эти скорости равны правым частям последних трех уравнений системы (1).
Очевидно, что модуль вектора воздушной скорости равен

Проекции воздушной скорости в связанной системе координат получим, умножая проекции (7) на матрицу перехода от земной нормальной к связанной системе координат согласно [8]:

Используя проекции (9) воздушной скорости на связанные оси, запишем формулы для углов атаки и скольжения с учетом ветра:

где αW, βW - значения углов атаки и скольжения с учетом ветра.
Вычисления проводятся следующим образом:
Скоростной напор q=ρHVa2/2, и формулы (5) и (6) также рассчитываются с учетом ветра, где вместо V подставляется Va – воздушная скорость, вычисляемая по формуле (8).
Для всех моделей динамики различных ЛА возможны различные варианты предъявления информации оператору: схематичное изображение, изображение с внекабинной обстановкой (с отображением приборной информации или без). Далее рассмотрены варианты визуализации при режиме захода на посадку ДПЛА.
При посадке современного ДПЛА для управления используются либо вид с самолета на землю, то есть оператор видит взлетно-посадочную полосу (ВПП) через видеокамеру, установленную на ДПЛА, так же, как летчик из кабины самолета, либо вид с земли на самолет, то есть оператор видит ДПЛА и ВПП как находящийся на земле наблюдатель. В обоих случаях оператор мысленно строит глиссаду и привязывает её к ВПП.
В стенде используется два метода визуализации:
Схематические изображения ВПП, глиссады и ДПЛА на фоне местности представлены на рис. 2. Схематические изображения на рис.2 соответствуют движению ДПЛА слева направо. При движении ДПЛА справа налево изображения зеркально изменятся.

Немаловажной является задача как выбора органов управления, обеспечивающих максимальную производительность, приемлемую стоимость и идентичность (аутентичность, соответствие) реальным органам управления ЛА (как наиболее привычным и удобным для оператора), так и задача сопряжения органов управления с ПЭВМ.
В качестве органов управления рассматривались следующие устройства:
Сравнение характеристик осуществлялось при помощи отдельно разработанного программного обеспечения, позволяющего провести серию однотипных экспериментов, выявляющих особенности работы устройств в разных режимах (неподвижное состояние, плавное отклонение), на основе регистрируемых данных. Каждый эксперимент длился T=119.995 секунд. Частота регистрации сигнала от джойстика f=200 Гц. Полученные в ходе экспериментов данные обрабатывались в полуавтоматическом режиме при помощи пакета прикладных программ MATLAB.
Для устройств (в совокупности с программной частью, обеспечивающей необходимый интерфейс) проводилось сравнение по следующим характеристикам:
Значения приведённых выше параметров некритичны для обычного – игрового – использования джойстиков, и могут изменяться в широком диапазоне, но в рамках выполняемой работы, требования значительно строже: в частности, это объясняется чувствительностью математических методов обработки получаемых данных.
Изучение полученных характеристик позволило обнаружить ошибки в библиотеке, обеспечивающей взаимодействие с модулем АЦП. Так как пульт, подключаемый к ПЭВМ посредством данного модуля АЦП, имел достаточно высокое разрешение по амплитуде (превосходя по этому показателю ближайшего «конкурента» – Top Gun AfterBurner II – приблизительно в 34 раза), библиотека была переписана с учётом возможностей многопоточных приложений.
Несмотря на одинаковые (пренебрежимо малые) значения времени получения данных, показанные всеми устройствами, Hotas Warthog обладает многократно большим разрешением, чем пульт АРМ-Л и не имеет шума выходных сигналов, а максимальная флуктуация в ходе эксперимента составила 0.0008% от всего диапазона. К тому же, джойстик является репликой соответствующего органа управления штурмовика A-10C (ВВС США), что является дополнительным преимуществом, учитывая требования, обусловленные назначением данного устройства.
Модуль регистрации данных имеет расширяемый интерфейс, позволяющий фиксировать интересуемые в рамках эксперимента характеристики. Используемые алгоритмы в совокупности с высокой производительностью современных ПЭВМ позволяют регистрировать данные с частотой несколько сотен герц.
Каждый записываемый параметр сохраняется как набор принимаемых им значений. Наборы агрегируются в структуру, содержащую помимо этого информацию об эксперименте: время проведения, идентификатор испытуемого и прочее. Полученная структура данных, по окончанию эксперимента сохраняется в файл, откуда может быть загружена в пакет прикладных программ MATLAB.
Обработка результатов производится в среде MATLAB в полуавтоматическом режиме. На данный момент написаны процедуры автоматической вёрстки результатов серии экспериментов в отчёты, путём генерации их кода на языке разметки гипертекста и экспорта объектов из MATLAB.
Для оценки характеристик деятельности человека-оператора используются ошибки слежения, статистические параметры ошибки слежения (математическое ожидание, дисперсия, СКО и др.), спектральные и корреляционные характеристики сигналов и ошибок и т.д.
Экспериментальные исследования, результаты которых приведены далее, проведены в целях изучения деятельности человека-оператора в следящей системе при установке на возможно более быструю отработку скачка входного воздействия, что соответствует, например, стробированию цели или первоначальному совмещению прицельной марки с целью для дальнейшего сопровождения.
Работа проводилась в развитие результатов, изложенных в статье [9], где, в частности, показано, что хорошо обученные, опытные операторы работают при установке на максимальное быстродействие в соответствии с принципом максимума [10]. Далее изложены результаты экспериментов, проведенных с увеличенным числом операторов, причем не имевших опыта работы со следящими системами и приобретавших его в ходе экспериментов. Более полно эксперименты описаны в [11].
Задающий символ (цель), отрабатывающий входное воздействие и отслеживающий символ (прицельная марка) предъявлялись на мониторе с экраном размером 350х250 мм и с графическим режимом 1024х768 пикселей.
На рис.4 задающий символ (ЗС) представлен кружком диаметром 15 пикселей (в 1 мм экрана 3,072 пикселей), отслеживающий символ (ОС) – окружностью размером 40 пикселей с двумя взаимно перпендикулярными диаметрами, имеющими разрыв в центре окружности.

Динамическая структура машинной части системы имитировалась в ПЭВМ. Там же проводилась регистрация результатов экспериментов и их математическая обработка.
Структурная схема экспериментальной установки с оператором приведена на рис.5, где обозначено: Кд – коэффициент передачи джойстика; WМЧ – передаточная функция машинной части контура управления.

Эксперименты проведены со следующими вариантами динамической структуры машинной части WМЧ:
В экспериментах, результаты которых приведены далее, принимали участие восемь мужчин 20–22 лет (студенты старших курсов). Исследовалось поведение оператора в качестве управляющего звена в контуре, представленном на рис.5, при подаче на вход контура скачка задающего символа. Величина скачка составляла 250 пикселей. Перед оператором ставилась задача перевода отслеживающего символа в новое положение задающего символа за минимальное время с помощью джойстика.




Результаты экспериментов позволили сделать следующие выводы:
В настоящей работе рассмотрены возможности применения полунатурного исследовательского стенда для оценивания характеристик деятельности человека-оператора при управлении ДПЛА.
Стенд организован таким образом, что позволяет свободно моделировать динамику различных ЛА и различные методы визуализации: модель динамики реализуется при помощи динамически загружаемой библиотеки динамической компоновки, с интерфейсом, представляющим оговорённый список экспортируемых функций. Динамика моделируется при помощи специального ПО – Диспетчера (в разработке которого принимали участие авторы), выгружающего динамические характеристики в разделяемую память, откуда они считываются необходимыми программными модулями, в том числе, программой визуализации.
На разработанном комплексе моделирования проведены эксперименты по оценке деятельности человека-оператора при управлении динамическими объектами различной сложности [11]. Эффективность стенда апробирована при решении следующих задач:
"Работа выполнена при поддержке РФФИ, проект № 12-08-31290"
Введение
В последние годы проявляется возрастающий интерес к созданию беспилотных авиационных систем на основе беспилотных летательных аппаратов (БЛА) и в том числе дистанционно-пилотируемых летательных аппаратов (ДПЛА), в управлении которыми весьма существенная роль отводится человеку-оператору (ЧО). По областям применения ДПЛА делятся на три основные группы: гражданского, военного и антитеррористического назначения.
Круг задач, решаемых ДПЛА, непрерывно расширяется. Если поначалу применение ДПЛА военного назначения ограничивалось решением задач разведки и радиопротиводействия, то в настоящее время разрабатываются ДПЛА-истребители, предназначенные для ведения воздушного боя, а также ударные ДПЛА, основной боевой задачей которых является уничтожение наземных средств ПВО противника и других военных объектов [1].
По мере расширения круга задач, решаемых ДПЛА, роль ЧО, его ответственность за эффективность и безопасность работы системы непрерывно возрастет. Все чаще приходится сталкиваться с ситуацией, когда от человека для поддержания нормального процесса функционирования беспилотных авиационных систем требуется, чуть ли не предельная мобилизация всех его возможностей, когда малейшее изменение в сторону усложнения деятельности или возникновение нештатной ситуации может привести к срыву. По статистике около 70% потерь ДПЛА происходит из-за ошибок ЧО [2, 3]. Из них более половины – результат завышения требований к человеку. Как показывает анализ состояния и тенденций развития систем управления и наведения ДПЛА, в предстоящие годы проблемы их проектирования во многом будут обусловлены необходимостью обеспечения оптимального взаимодействия человека с машиной частью системы. Указанные обстоятельства объясняют потребность в эффективных методах проектирования, обеспечивающих возможность учета свойств ЧО и согласования с ними машинной части системы.
Так как подготовка квалифицированных операторов по управлению ДПЛА является ресурсоемкой задачей, представляется актуальным рассмотреть вопрос оптимального согласования возможностей человека-оператора с машинной частью ДПЛА.
Целью данной работы является создание полунатурного исследовательского стенда для оценивания характеристик деятельности человека-оператора при управлении ДПЛА. На данном комплексе предполагается проведение экспериментов с большой вариативностью в задающих воздействиях, динамических структурах машинной части и др., что позволит глубже изучить возможности человека-оператора, а впоследствии эффективнее решать задачи проектирования человеко-машинных систем слежения.
1. Обоснование облика стенда.
На данном этапе исследований стоит задача разработки и апробирования полунатурного исследовательского стенда для оценивания характеристик деятельности человека-оператора при управлении ДПЛА. Исходя из рассмотренного выше, представляется целесообразным предъявить следующие требования к облику стенда. Необходимо реализовать инструментарий, позволяющий:
- произвести математическое моделирование динамики ДПЛА различных типов;
- использовать разные способы отображения информации оператору;
- использовать в качестве органов управления различных устройств ввода;
- проведение экспериментов по управлению ДПЛА в различных режимах;
- оценивать характеристики человека-оператора при управлении ДПЛА;
- учитывать операционную напряженность человека-оператора при управлении ДПЛА;
- расширять функциональные возможности стенда для других задач.
В соответствии с вышеописанным, стенд организован таким образом, что позволяет свободно комбинировать модели динамики различных ЛА и различные методы визуализации: модель динамики реализуется при помощи динамически загружаемой библиотеки динамической компоновки, с интерфейсом, представляющим оговорённый список экспортируемых функций. Динамика моделируется при помощи специального ПО – Диспетчера (в разработке которого принимали участие авторы), выгружающего динамические характеристики в разделяемую память, откуда они считываются необходимыми программными модулями, в том числе, программой визуализации.
2. Реализация математической модели аэродинамики ДПЛА
Для уменьшения погрешностей, вызванных упрощением уравнений движения, рекомендуется выбирать модель пространственного движения самолета, например, представленную в [4, 5]. При этом обеспечивается относительная простота уравнений и одновременно весьма полный учет известных из динамики полета связей между параметрами движения. Аэродинамические коэффициенты описываются общепринятыми линейными моделями, а при необходимости учета нелинейностей – полиномами или сплайнами 1 или 3 порядков.
В настоящее время известно много различных моделей движения самолетов, отличающихся степенью сложности и принятыми допущениями [4]. Достаточно полная нелинейная модель пространственного движения самолета при допущении, что оси связанной системы координат совпадают с главными осями инерции, имеет вид [4]:
Ускорения вдоль связанных осей:
Перегрузки вдоль связанных осей:
В системах уравнений (1)-(3) используются следующие обозначения:
α, β – углы атаки и скольжения, рад;
ωx, ωy, ωz – угловые скорости относительно связанных осей, рад./с;
θ, γ, ψ – углы тангажа, крена, рыскания, рад.;
V – истинная воздушная скорость, м/с;
H=Yg – высота полета, м;
Xg, Yg, Zg - координаты полета в земной нормальной системе координат;
mx, my, mz – коэффициенты аэродинамических моментов;
cx, cy, cz – коэффициенты аэродинамических сил в связанной системе координат;
Jx, Jy, Jz , Jxy – моменты инерции относительно связанных осей, кг×м2;
m – масса самолета, кг;
l, bA – размах крыла и длина средней аэродинамической хорды, м;
S – эквивалентная площадь крыла, м2;
q=ρHV2/2 – скоростной напор, Па;
ρH – плотность воздуха на высоте полета, кг/м3;
cp=P/qS – коэффициент тяги двигателей;
Рпр, Рлeв – сила тяги правого и левого двигателей, Н;
kдв – кинетический момент роторов двигателей, кг×м2;
удв, zдв – координаты двигателя относительно связанных осей, м;
φдв – угол установки двигателей, рад.
Значения коэффициентов подъемной силы и сопротивления, определенные по результатам аэродинамических продувок, обычно задаются в полусвязанной системе координат OXeYeZe. Для перевода данных коэффициентов из одной системы в другую используются соотношения:
где cxe, cye – коэффициенты составляющих аэродинамической силы в полусвязанной системе координат;
cx, cy – коэффициенты составляющих аэродинамической силы в связанной системе координат.
Линейная модель аэродинамических коэффициентов продольного и бокового движения имеет вид
где параметрами являются производные коэффициентов аэродинамических сил и моментов по углу атаки α, отклонению стабилизатора δВ, углу скольжения β, отклонениям руля направления δн и элеронов δэ, угловым скоростям ωx, ωy, ωz.
С целью оценки соответствия характеристик ЛА выполнялись стандартные контрольные режимы для определения характеристик устойчивости и управляемости: импульсы, ступенчатые дачи, перекладки органами управления и т.п. В комплексе с данными режимами выполнялись многоступенчатые тестовые режимы для уточнения параметров математической модели методами идентификации. Далее использовалась программа DatCheck [6], предназначенная для проверки правильности измерений и регистрации полетных данных, характеризующих движение самолета: углов атаки, скольжения, крена, тангажа, истинной воздушной скорости, а также угловых скоростей ωx, ωy, ωz и перегрузок nx, ny, nz, измеренных в связанной системе координат.
3. Разработка модели внешней среды
Для моделирования условий, приближенных к реальным условиям эксплуатации в стенде реализуется:
- модель стандартной атмосферы по [7], по которой в том числе рассчитываются значения плотности воздуха и статического давления на высоте полета;
- модель ветра, в которой ветер (скорость и направление) представлен как произвольная функция от времени, задаваемая в соответствии с целями эксперимента.
Пусть скорость ветра задается тремя проекциями на оси земной нормальной системы координат Vxg_W, Vyg_W, Vzg_W.
Тогда проекции воздушной скорости самолета в земной нормальной системе координат имеют вид:
где Vxg, Vyg, Vzg – значения проекций скорости ЛА в спокойной атмосфере на оси нормальной земной системы. Эти скорости равны правым частям последних трех уравнений системы (1).
Очевидно, что модуль вектора воздушной скорости равен
Проекции воздушной скорости в связанной системе координат получим, умножая проекции (7) на матрицу перехода от земной нормальной к связанной системе координат согласно [8]:
Используя проекции (9) воздушной скорости на связанные оси, запишем формулы для углов атаки и скольжения с учетом ветра:
где αW, βW - значения углов атаки и скольжения с учетом ветра.
Вычисления проводятся следующим образом:
- задаются проекции скорости ветра в земной системе координат и начальные условия для системы (1);
- по формулам (7)-(9) вычисляются для начальных условий значения углов атаки и скольжения αW, βW с учетом ветра;
- решаются численно дифференциальные уравнения для спокойной атмосферы (1) с учетом соотношений (2) и (3). В ходе решения в формулы (4)-(6) подставляются углы атаки и скольжения αW, βW, вычисленные с учетом ветра.
Скоростной напор q=ρHVa2/2, и формулы (5) и (6) также рассчитываются с учетом ветра, где вместо V подставляется Va – воздушная скорость, вычисляемая по формуле (8).
4. Способы предоставления информации при посадке ДПЛА и разработка системы визуализации
Для всех моделей динамики различных ЛА возможны различные варианты предъявления информации оператору: схематичное изображение, изображение с внекабинной обстановкой (с отображением приборной информации или без). Далее рассмотрены варианты визуализации при режиме захода на посадку ДПЛА.
При посадке современного ДПЛА для управления используются либо вид с самолета на землю, то есть оператор видит взлетно-посадочную полосу (ВПП) через видеокамеру, установленную на ДПЛА, так же, как летчик из кабины самолета, либо вид с земли на самолет, то есть оператор видит ДПЛА и ВПП как находящийся на земле наблюдатель. В обоих случаях оператор мысленно строит глиссаду и привязывает её к ВПП.
В стенде используется два метода визуализации:
- Визуализация, отображающая основные элементы информационного поля кабины и внекабинную обстановку, реализована с использованием программных библиотек Xors3d Engine и 3D-моделей местности реального аэродрома. Пример предоставляемой оператору информации показан на рис 1.
 Рис 1. Визуализация вида с самолета на землю
Рис 1. Визуализация вида с самолета на землю - Уменьшить погрешности построения глиссады и привязки к ВПП, одновременно освобождая центральную нервную систему оператора от этой работы, можно, представив оператору на мониторе схематичные изображения ВПП, глиссады и ДПЛА. Погрешность уменьшается благодаря значительно более точному, чем мысленное, представлению глиссады и получения более точной информации об отклонении ДПЛА от глиссады, а также высвобождении некоторого объёма внимания, который оператор может использовать для более точной подстройки (в основном бессознательной) своих динамических параметров к динамической структуре контура ДПЛА.

Схематические изображения ВПП, глиссады и ДПЛА на фоне местности представлены на рис. 2. Схематические изображения на рис.2 соответствуют движению ДПЛА слева направо. При движении ДПЛА справа налево изображения зеркально изменятся.
Рис. 2. Схематические изображения
| 1 | Индикация рассогласования ДПЛА с глиссадой по высоте и тангажу. |
| 2 | Индикация рассогласования ДПЛА с глиссадой по горизонтали и рысканью. |
| 3 | Фотоснимок (вид на аэродром сверху) ВПП и прилегающей местности с наложенной схемой (глиссада, БПРМ, ДПЛА). |
| 4 | Фотоснимок (вид на аэродром сбоку) ВПП и прилегающей местности с наложенной схемой (глиссада, БПРМ, ДПЛА). |
| 5 | Глиссада |
| 6 | Точка касания ДПЛА и ВПП и источник света 1 (ИС1). |
| 7 | Зона действия ближнего приводного радиомаяка(БПРМ) и источник света 2 (ИС2). |
| 8 | Схематичное изображение ДПЛА |
5. Подключение органов управления
Немаловажной является задача как выбора органов управления, обеспечивающих максимальную производительность, приемлемую стоимость и идентичность (аутентичность, соответствие) реальным органам управления ЛА (как наиболее привычным и удобным для оператора), так и задача сопряжения органов управления с ПЭВМ.
В качестве органов управления рассматривались следующие устройства:
Название устройства | Фотография усторйства |
Пульт АРМ-Л с внешним АЦП |  |
Джойстик Thrustmaster Top Gun AfterBurner II |  |
Джойстик Thrustmaster Hotas Warthog |  |
Сравнение характеристик осуществлялось при помощи отдельно разработанного программного обеспечения, позволяющего провести серию однотипных экспериментов, выявляющих особенности работы устройств в разных режимах (неподвижное состояние, плавное отклонение), на основе регистрируемых данных. Каждый эксперимент длился T=119.995 секунд. Частота регистрации сигнала от джойстика f=200 Гц. Полученные в ходе экспериментов данные обрабатывались в полуавтоматическом режиме при помощи пакета прикладных программ MATLAB.
Для устройств (в совокупности с программной частью, обеспечивающей необходимый интерфейс) проводилось сравнение по следующим характеристикам:
- максимальная задержка получения данных (мс.);
- средняя задержка получения данных (мс.);
- разрешающая способность (уровни);
- максимальная флуктуация при отсутствии воздействия (% от всего диапазона);
- характеристики шума сигнала от устройства.
Значения приведённых выше параметров некритичны для обычного – игрового – использования джойстиков, и могут изменяться в широком диапазоне, но в рамках выполняемой работы, требования значительно строже: в частности, это объясняется чувствительностью математических методов обработки получаемых данных.
Изучение полученных характеристик позволило обнаружить ошибки в библиотеке, обеспечивающей взаимодействие с модулем АЦП. Так как пульт, подключаемый к ПЭВМ посредством данного модуля АЦП, имел достаточно высокое разрешение по амплитуде (превосходя по этому показателю ближайшего «конкурента» – Top Gun AfterBurner II – приблизительно в 34 раза), библиотека была переписана с учётом возможностей многопоточных приложений.
Несмотря на одинаковые (пренебрежимо малые) значения времени получения данных, показанные всеми устройствами, Hotas Warthog обладает многократно большим разрешением, чем пульт АРМ-Л и не имеет шума выходных сигналов, а максимальная флуктуация в ходе эксперимента составила 0.0008% от всего диапазона. К тому же, джойстик является репликой соответствующего органа управления штурмовика A-10C (ВВС США), что является дополнительным преимуществом, учитывая требования, обусловленные назначением данного устройства.
6. Разработка средств регистрации и обработки результатов экспериментов
Модуль регистрации данных имеет расширяемый интерфейс, позволяющий фиксировать интересуемые в рамках эксперимента характеристики. Используемые алгоритмы в совокупности с высокой производительностью современных ПЭВМ позволяют регистрировать данные с частотой несколько сотен герц.
Каждый записываемый параметр сохраняется как набор принимаемых им значений. Наборы агрегируются в структуру, содержащую помимо этого информацию об эксперименте: время проведения, идентификатор испытуемого и прочее. Полученная структура данных, по окончанию эксперимента сохраняется в файл, откуда может быть загружена в пакет прикладных программ MATLAB.
Обработка результатов производится в среде MATLAB в полуавтоматическом режиме. На данный момент написаны процедуры автоматической вёрстки результатов серии экспериментов в отчёты, путём генерации их кода на языке разметки гипертекста и экспорта объектов из MATLAB.
Для оценки характеристик деятельности человека-оператора используются ошибки слежения, статистические параметры ошибки слежения (математическое ожидание, дисперсия, СКО и др.), спектральные и корреляционные характеристики сигналов и ошибок и т.д.
7. Результаты проведения экспериментов по изучению характеристик деятельности человека-оператора в системах слежения
Экспериментальные исследования, результаты которых приведены далее, проведены в целях изучения деятельности человека-оператора в следящей системе при установке на возможно более быструю отработку скачка входного воздействия, что соответствует, например, стробированию цели или первоначальному совмещению прицельной марки с целью для дальнейшего сопровождения.
Работа проводилась в развитие результатов, изложенных в статье [9], где, в частности, показано, что хорошо обученные, опытные операторы работают при установке на максимальное быстродействие в соответствии с принципом максимума [10]. Далее изложены результаты экспериментов, проведенных с увеличенным числом операторов, причем не имевших опыта работы со следящими системами и приобретавших его в ходе экспериментов. Более полно эксперименты описаны в [11].
Задающий символ (цель), отрабатывающий входное воздействие и отслеживающий символ (прицельная марка) предъявлялись на мониторе с экраном размером 350х250 мм и с графическим режимом 1024х768 пикселей.
На рис.4 задающий символ (ЗС) представлен кружком диаметром 15 пикселей (в 1 мм экрана 3,072 пикселей), отслеживающий символ (ОС) – окружностью размером 40 пикселей с двумя взаимно перпендикулярными диаметрами, имеющими разрыв в центре окружности.
Рис.4. Задающий и отслеживающий символы
Динамическая структура машинной части системы имитировалась в ПЭВМ. Там же проводилась регистрация результатов экспериментов и их математическая обработка.
Структурная схема экспериментальной установки с оператором приведена на рис.5, где обозначено: Кд – коэффициент передачи джойстика; WМЧ – передаточная функция машинной части контура управления.
Рис.5. Структурная схема экспериментальной установки
Эксперименты проведены со следующими вариантами динамической структуры машинной части WМЧ:
- безынерционное линейное звено с коэффициентом передачи WМЧ=1;
- инерционное (апериодическое) звено
, где К = 1, T = 1 с;
- интегрирующее звено
, где К = 1 мм/с;
- звено 2-го порядка
, где К = 1 мм/с; T = 1 с.
В экспериментах, результаты которых приведены далее, принимали участие восемь мужчин 20–22 лет (студенты старших курсов). Исследовалось поведение оператора в качестве управляющего звена в контуре, представленном на рис.5, при подаче на вход контура скачка задающего символа. Величина скачка составляла 250 пикселей. Перед оператором ставилась задача перевода отслеживающего символа в новое положение задающего символа за минимальное время с помощью джойстика.
Рис.6. График переходного процесса для WМЧ=K=1
Рис.7. График переходного процесса для инерционного звена
Рис.8. График переходного процесса для интегрирующего звена
Рис.9. График переходного процесса для звена 2-го порядка
Результаты экспериментов позволили сделать следующие выводы:
- операторы после тренировки отрабатывали примерно 90% скачка входного сигнала как регуляторы, оптимальные по быстродействию, строя управление в соответствии с принципом максимума, а оставшиеся относительно малые рассогласования – как линейное звено;
- операторы при отработке 90% скачка входного воздействия имели дело с машинной частью нулевого, первого и второго порядков в соответствии с теоретическими положениями принципа максимума:
- для машинной части нулевого порядка – перевод органа управления в новое положение (рис.3);
- для машинной части первого порядка:
- для апериодического звена – перевод органа управления в крайнее положение и возвращение в новое (заданное входным сигналом) положение (рис.4);
- для интегрирующего звена – перевод органа управления в крайнее положение и возвращение в нулевое положение (рис.5);
- для апериодического звена – перевод органа управления в крайнее положение и возвращение в новое (заданное входным сигналом) положение (рис.4);
- для машинной части второго порядка – перевод органа управления в крайнее положение, затем переброс органа управления в противоположное крайнее положение, затем возврат в нулевое положение для машинной части с интегратором (рис.6);
- часть операторов, хорошо освоивших работу с машинной частью первого порядка, переносили свой опыт на работу с машинной частью второго порядка, формируя управление в виде одного максимального отклонения органа управления. Переучивание этих операторов для работы с машинной частью второго порядка в соответствии с принципом максимума (два крайних положения и одно переключение органа управления) потребовало значительных временных затрат.
- для машинной части нулевого порядка – перевод органа управления в новое положение (рис.3);
8. Заключение
В настоящей работе рассмотрены возможности применения полунатурного исследовательского стенда для оценивания характеристик деятельности человека-оператора при управлении ДПЛА.
Стенд организован таким образом, что позволяет свободно моделировать динамику различных ЛА и различные методы визуализации: модель динамики реализуется при помощи динамически загружаемой библиотеки динамической компоновки, с интерфейсом, представляющим оговорённый список экспортируемых функций. Динамика моделируется при помощи специального ПО – Диспетчера (в разработке которого принимали участие авторы), выгружающего динамические характеристики в разделяемую память, откуда они считываются необходимыми программными модулями, в том числе, программой визуализации.
На разработанном комплексе моделирования проведены эксперименты по оценке деятельности человека-оператора при управлении динамическими объектами различной сложности [11]. Эффективность стенда апробирована при решении следующих задач:
- оценка алгоритма проверки правильности регистрации полетных данных;
- оценка алгоритмов определения погрешностей бортовых измерений высотно-скоростных параметров;
- исследование деятельности человека-оператора по управлению ДПЛА при разных типах решаемой задачи (взлет, полет по маршруту, посадка).
"Работа выполнена при поддержке РФФИ, проект № 12-08-31290"
Библиографический список
- Современные информационные технологии в задачах навигации и наведения беспилотных маневренных летательных аппаратов / Под ред. М.Н. Красильщикова, Г.Г. Себрякова – М.: Физматлит, 2009. – 556 с.
- Моисеев С. Состояние и перспективы развития боевых беспилотных авиационных систем США // Аэрокосмическое обозрение. – 2010. – №3. – с. 34-39.
- C4ISR Journal, September 2009. – 68 с.
- Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов. /Под редакцией Г.С. Бюшгенса. М.: Наука, 1998, – 811 с.
- Корсун О.Н., Семенов А.В. Методика определения характеристик устойчивости и управляемости высотного дозвукового самолета М-55 «Геофизика» по результатам летного эксперимента и моделирования // Полет,– 2006. – № 2. – с. 22-29.
- Корсун О.Н. Методы параметрической идентификации технических систем: электронное учебное пособие. М., МГТУ им. Н.Э. Баумана. http://db.inforeg.ru/deposit/Catalog/mat.asp?id=286062, зарегистрировано во ФГУП "Информрегистр" № 0321100941, 2011 г.
- ГОСТ 4401-81. Атмосфера стандартная. Параметры. – М.: Издательство стандартов, 1982. – 181 с.
- ГОСТ 20058-80. Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения. – М.: Издательство стандартов, 1981. – 54 с.
- Себряков Г.Г. Экспериментальное исследование характеристик деятельности человека-оператора в динамических системах слежения и наведения летательных аппаратов // Характеристики деятельности оператора; под ред. Б.Ф. Ломова. – М.: ВНИИТЭ, 1983. – с.42-80
- Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Математическая теория оптимальных процессов. – изд. 4-е. – М.: Наука, Главная редакция физико-математической литературы, 1983. – 393 с.
- Огинский А.А., Бурлак Е.А., Набатчиков А.М. Экспериментальные исследования работы человека-оператора в режиме слежения при установке на максимальное быстродействие // Труды ГосНИИАС. ВОПРОСЫ АВИОНИКИ. – М.: ГосНИИАС, 2010. – №19. – с.22-32.
Комментарии